|
|
|
|
|
| Products & Services > Deformation Monitoring > mmVu® GNSS Monitoring System > Applied Technologies |
|
mmVu® Applied Technologies
The mmVu® system adopts GNT's parallel processing technology which utilizes proprietary GNSS carrier phase processing filters to achieve mm-level deformation and sub-mm trend analysis. This unique technology delivers robust quality control and performance assurance to help the users achieve their positioning needs in the most challenging GNSS environments.
Proprietary Filters
The mmVu® system utilizes two main GNT's proprietary filters – Time-Delayed Doppler (TDD) filter and Double-Differenced Carrier (DDC) filter. The TDD filter is characterized as a band pass filter that can mitigate the error sources and noise of GPS observations having low- and high-frequency components in their error spectrum. TDD solutions are generated without the need to solve for the integer ambiguities of the GNSS carrier phase observations. The DDC filter is a regularized low pass filter that factors the quality of DDC observations and a time constant in a smoothing process. A regularization process is implemented to make the DDC filter quickly extract displacement trends with mm level precision in less than a few hours. The DDC filter is characterized as a finite impulse response (FIR) filter.
Even under the most challenging GNSS environments such as long-range baselines, significant height differences between stations and strong multipath, the mmVu® system can provide positioning and monitoring solutions without compromising its accuracy by effectively mitigating the residual effects of biases and errors in the GNSS carrier phase observations.
Scalable, Repeatable and Modularized
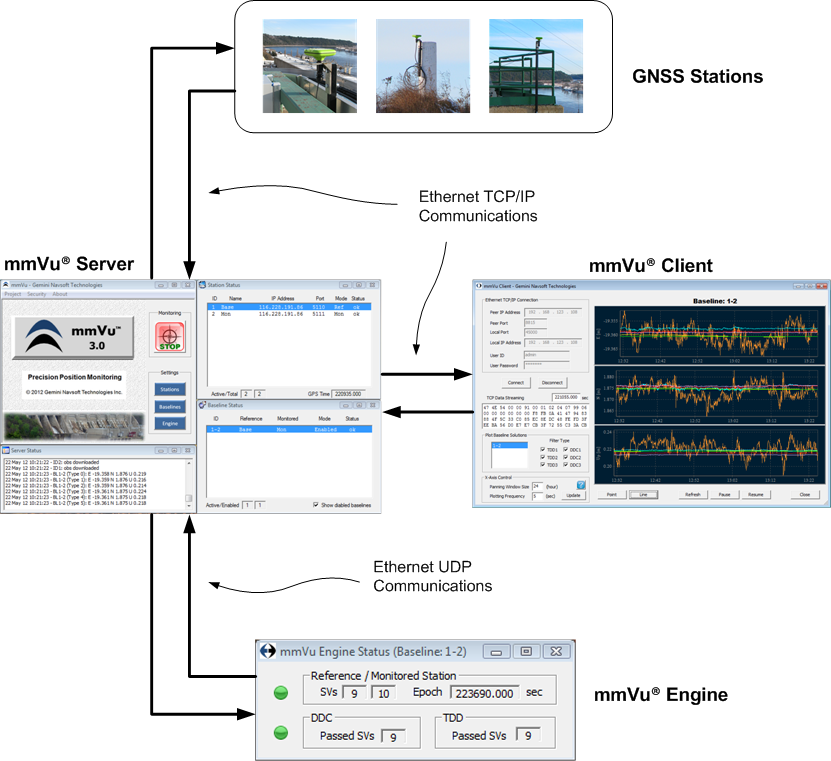
The mmVu® RT software (e.g., mmVu® Solver, mmVu® Server, mmVu® Synergizer) connects GNSS stations and processing engines through Ethernet TCP/IP and UDP communications. A unique data streaming wrapper application, which feeds many instances of the core processing function and multicasts raw data to each GNSS baseline, handles the increased complexity of GNSS monitoring applications which may have 100s of baselines and provides scalable monitoring solutions from small to large projects.
The
mmVu® PP software (e.g., mmVu®
LabCue, mmVu® LabTime, mmVu®
LabSync) standardizes various GNSS data files and streams
the standardized data to processing engines through Ethernet TCP/IP and
UDP communications. A unique data file wrapper application, which
replicates mmVu® Server operations and multicasts the standardized data to
each GNSS baseline, provides simulated scenarios identical to the
real-time environments. The mmVu® sub-systems (e.g., mmVu® RT, mmVu® Client and Engines) are modularized and designed to run independently. According to users’ requirements, the sub-systems can be configured to run on either a single hardware platform or multiple server computers. This approach enables the users to optimize system configuration for scalable monitoring applications.
Example mmVu® system configuration
|
|
|
|||
© 2013 Gemini Navsoft Technologies Inc. - All rights reserved. |
This website is optimized for Google Chrome, Mozilla Firefox and Apple Safari.