|
|
|
|
|
| Products & Services > Deformation Monitoring > mmVu® GNSS Monitoring System > Performance Analysis |
|
mmVu® Performance Analysis
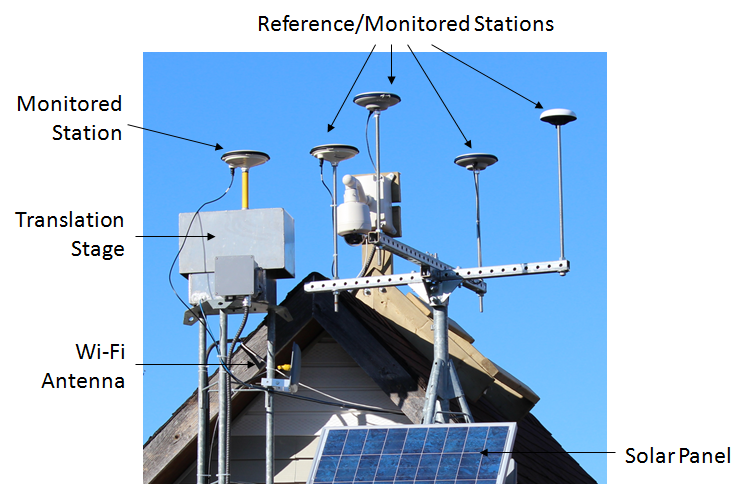
Gemini Navsoft Technologies' (GNT) testing facility provides complete hardware and software solutions for testing the displacement detection capabilities of mmVu® software. The GNT testbed consists of two monuments. Several antennas for base and monitored stations are located on separate monuments. One monitored antenna is located on a translation stage with controlled movements. The translation stage allows both horizontal (east direction) and vertical movements of the monitored station antenna with sub-millimetre level precision [resolution spec].
mmVu® Software and Hardware Testbed
GNT Translation Stage Linear Positioners
mmVu® (Static Version)
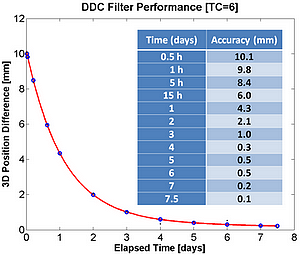
To validate the displacement detection capabilities of mmVu® software, multiple simulations were conducted. In one experiment, 5 mm displacement in 10 seconds was introduced. TDD/DDC filters have demonstrated the capability to detect the full size displacement with different types of filter settings. Optimal performance in this test in terms of detection time and maximum solution accuracy was obtained using 6 hour time constant DDC filter.
White papers that describe the details of mmVu® performance analysis are provided here.
mmVu® (Kinematic Version)
The kinematic version of mmVu® software utilizes GNT’s proprietary Real-Time Kinematic (RTK) processing technique that allows for cm level, instantaneous relative position determination. It is specifically designed for kinematic or semi-static applications where monitored stations are moving or experiencing high dynamics.
Table 1 outlines the performance specifications of the kinematic version of mmVu® software, determined under a variety of situations, including GPS alone, no constraint or a priori information on the solutions, short baselines (< 10 km), and kinematic mode.
Table 1. mmVu® (Kinematic version) performance specifications
1The software provides epoch-by-epoch (i.e., instantaneous) solutions that do not require conventional initialization time. The initialization time given above is the time required for calibrating the noise of the GPS carrier phase measurements for the first time. 2Position Dilution of Precision (PDOP) is the geometrical effect on the GPS accuracy of three dimensional positioning solutions. 3Distance root mean squared.
|
|
|
|||
© 2013 Gemini Navsoft Technologies Inc. - All rights reserved. |
This website is optimized for Google Chrome, Mozilla Firefox and Apple Safari.